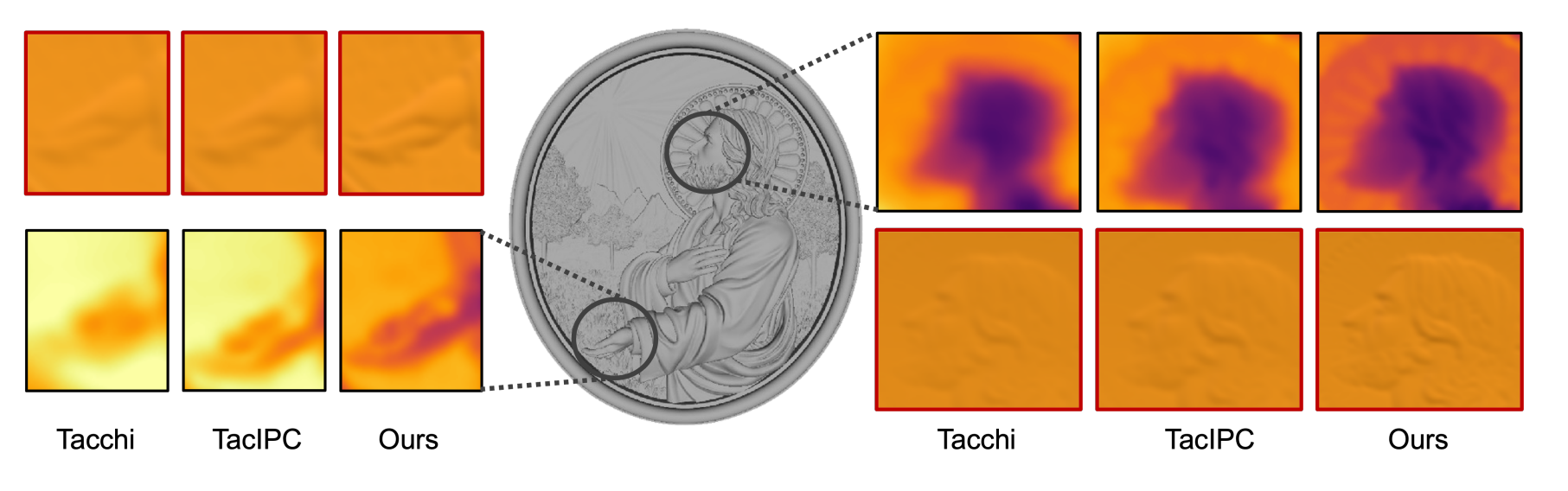
Tactile perception is essential for dexterous manipulation, yet high-resolution elastomer simulation remains computationally expensive. FEM offers high fidelity but requires costly remeshing, while MPM incurs significant memory overhead. We present a reduced-order neural simulation framework that combines coarse-grained MPM with an implicit neural decoder to recover fine tactile deformations from compact latent states. By learning a continuous deformation manifold from paired high- and low-resolution simulations, the model enables physically consistent and differentiable inference. Compared with TacIPC, our method achieves 65% faster simulation and 40% lower memory usage while improving geometric fidelity. It further improves tactile rendering and 3D reconstruction accuracy by 25%, producing realistic depth images and surface meshes at faster inference speeds. These results demonstrate an efficient and physically grounded solution for high-detail tactile simulation.